Through Standard Computation I strive to provide quality software and graphics.
Services include software tool development, image / animation rendering and 3D modeling.
Inquiries can be sent to standardcomputation@gmail.com.
Through Standard Computation I strive to provide quality software and graphics.
Services include software tool development, image / animation rendering and 3D modeling.
Inquiries can be sent to standardcomputation@gmail.com.
python
machine learning
An ongoing experiment devised by Petr van Blokland from TYPETR, this project seeks to determine whether machine learning models are capable of kerning typefaces. High volume and low individual risk makes kerning a suitable task for a ML model.
Applications include providing baseline kerning values for unkerned fonts and detecting kern pairs that may have been asigned an incorrect kern value. Current experiments are focussed on either creating a generalized model that works for multiple fonts or training a model on a very small number of examples. Both of these approaches aim to maximize how much kerning the model can do for new fonts.
Models were created using PyTorch and trained on 32x32 images of glyph pairs.
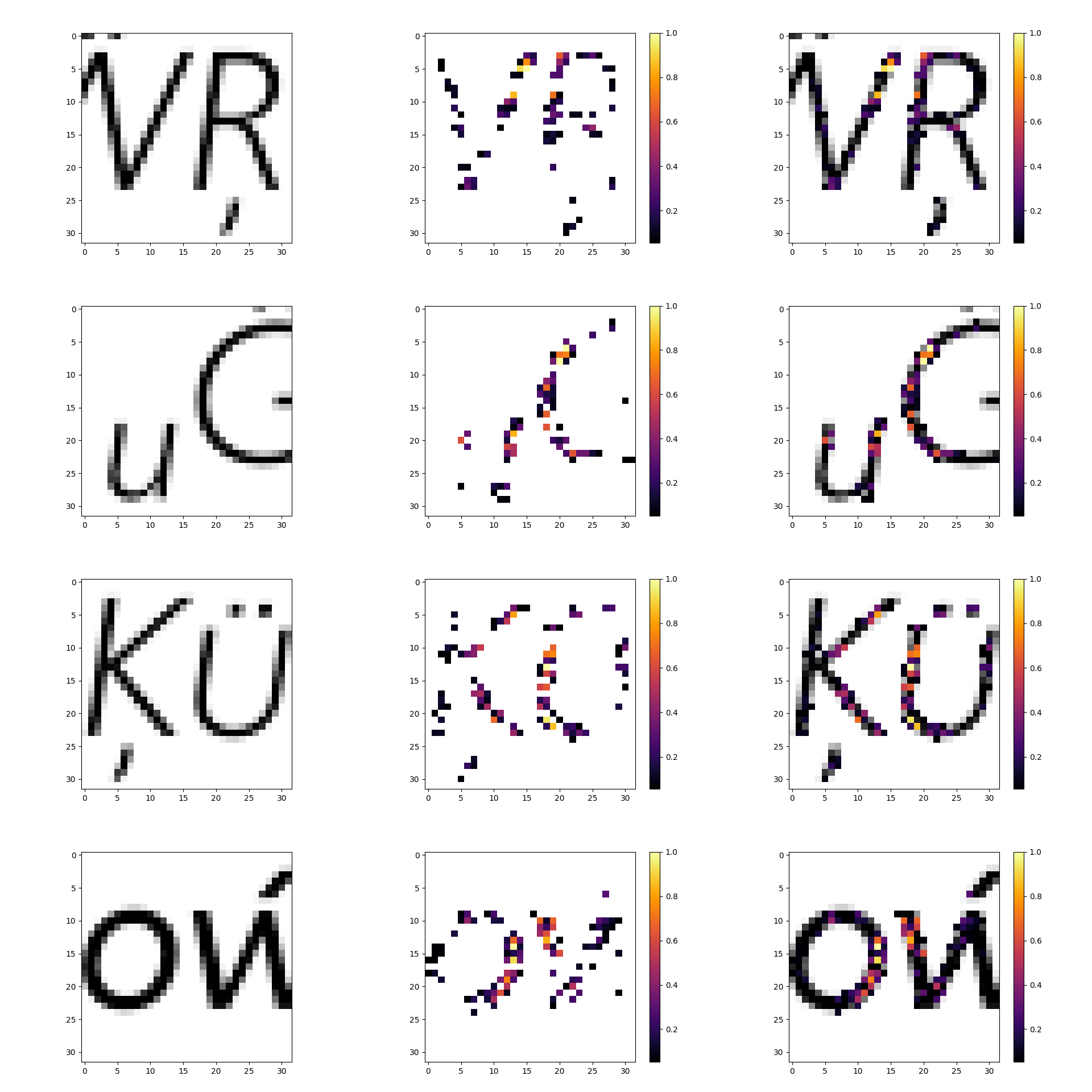
Left column: examples of images used for training.
Middle column: results of input importance analysis.
Right column: middle column overlayed onto left column.
The font used in these examples is Upgrade by Petr van Blokland.
blender
geometry nodes
A project done for Françoise Berserik in collaboration with Erik van Blokland from LETTERROR. This Blender Geometry Nodes network converts a curve outline of a glyph into a mesh that resembles the glyph if carved.
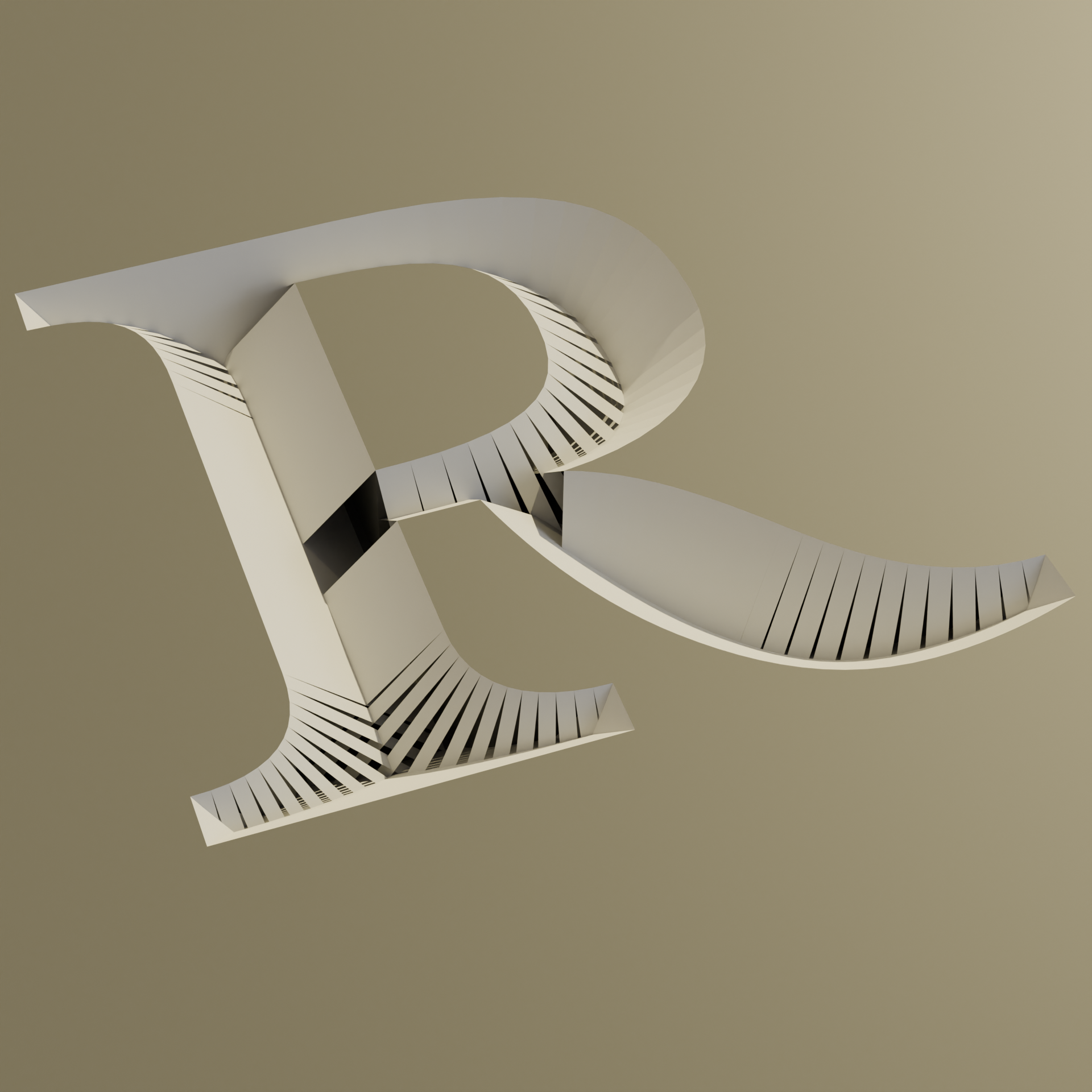
The goal of this project was to create a render for use in a book on letter carving theory. Below are a series of images indicating how a glyph outline can be turned into an approximation of its carved shape.

The final render, which was used in the book. Design of the R by Erik van Blokland.

Initial glyph outline.
Preliminary mesh.

Completed mesh.
blender
geometry nodes
Interloper is a personal project, a work-in-progress animation about a robot breaking into a facility of sorts.
This section concerns the main character: an impossibly thin, gravity defying robot with a myriad of useful appendages. The robot's geometry comprises simple, angular meshes connected by spiraling joints. These joints use geometry nodes to automatically twist when armature motion occurs.
The robots appendages attach to one of two circular connectors, allowing each appendage to rotate around the central axis. Legs and arms which would normally be mirrored are instead built to work both forwards and backwards, ensuring functionality regardless of position on the circular connector.
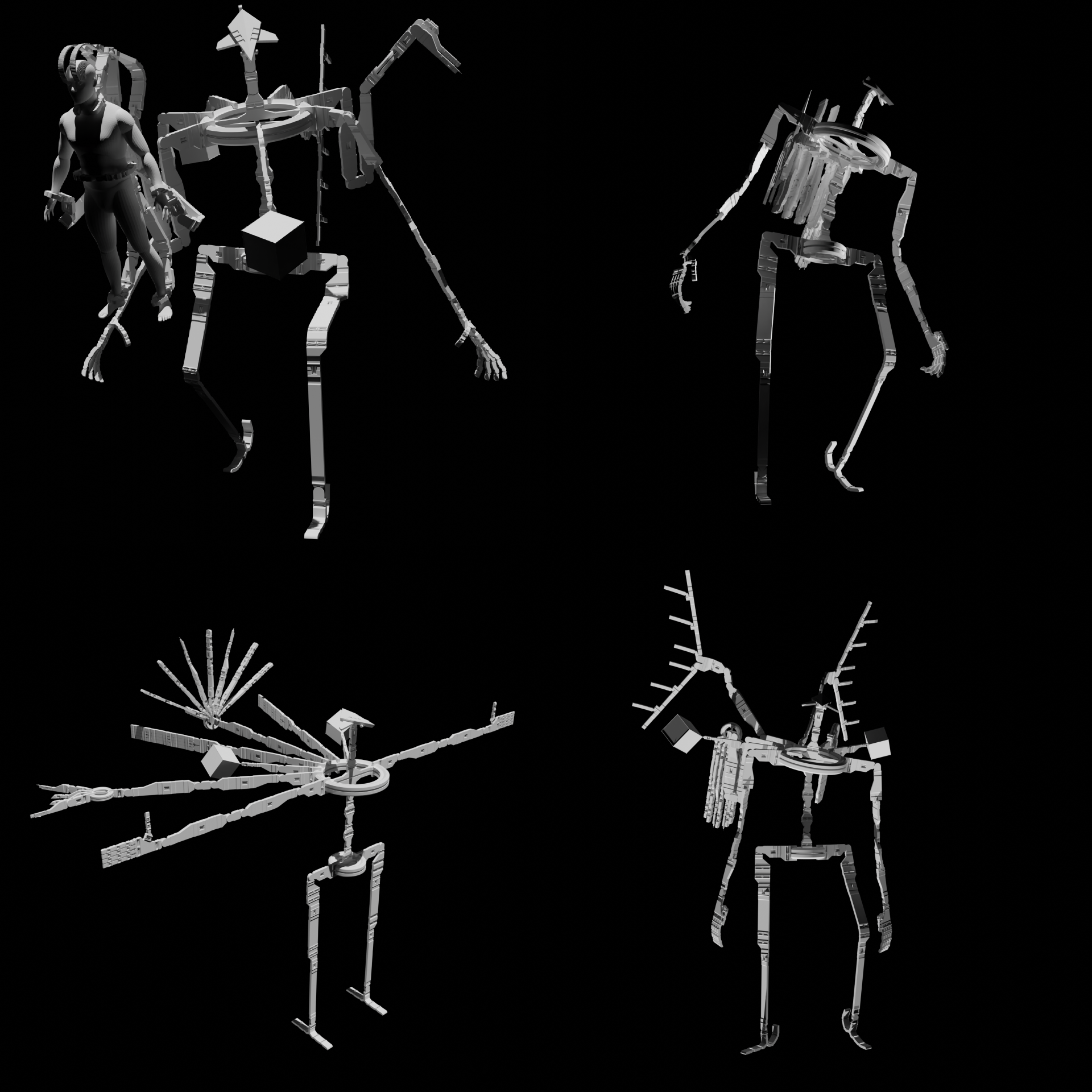
A series of images of the robot.
blender
geometry nodes
As mentioned in Interloper: Robot, the animation is going to be set in a currently unspecified facility. Whatever they're doing in said facility, it's going to involve carrying large and heavy objects between locations. This in turn is going to involve cranes.
Enormous, ceiling bound, omni-wheel driven cranes seemed evocative, and much more wasn't needed to get started on them. The entire crane is generated using geometry nodes, and doesn't require any initial geometry. The upside of this approach is that any aspect of the crane can be adjusted with value inputs. Downside is that an object as complex as the crane results in many, many inputs, which isn't always an enjoyable tool to use.
Although the inputs describing the cranes features are many, the inputs that control its usage are few. Two vectors and a float are all that is needed to lower and adjust the position of the crane head and cargo. Furthermore, the omni-wheel tank treads will automatically adjust as the location of the crane is animated (or as it's moved in the editor).
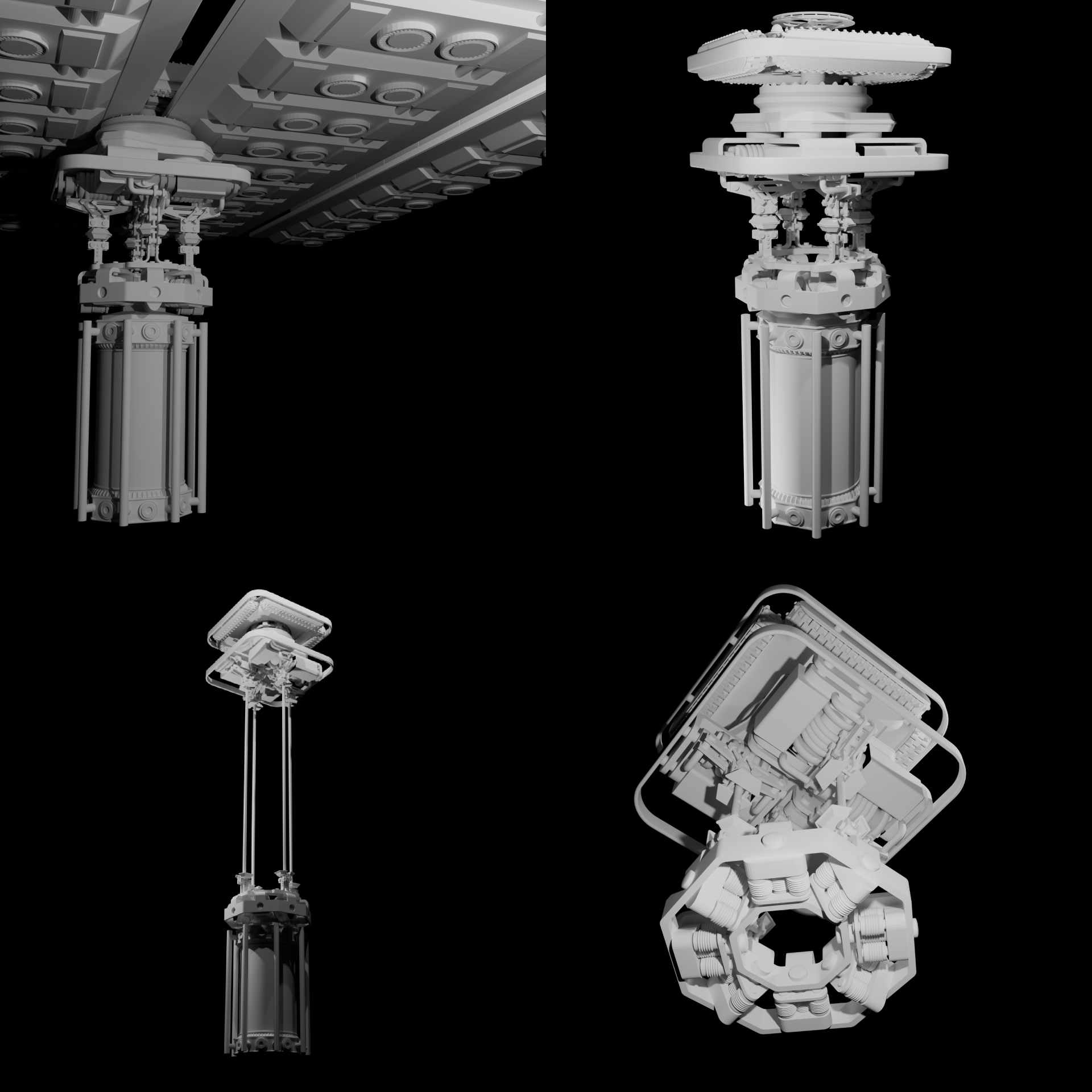
A series of images of the crane.